







AGV站点识别系统
浏览次数:51453
分类:智能制造系统


本系统主要适用于AGV送料车,送餐机器人、巡检机器人、采摘机器人、挂轨机器人等各种类型AGV机器人的站点识别领域。
系统优势
- 能满足不同行驶速度下AGV车站点准确识别,最快可支持速度2.5m/s
- 能满足不同高度AGV车站点的准确识别,最大可支持50cm识别高度
- 能满足不同电压AGV车设计要求,最大支持电压30V,最小9V
- RFID读写器可通过RS232、RS485串行接口与PLC、单片机等通讯,并可定制MODBUS-RTU协议,支持RS485总线
- RFID读写器采用工业级设计,并能有效抗击电磁干扰及金属干扰
- RFID地标支持用户自定义编码,支持外贴或埋地不同场景安装要求
系统原理
以AGV送料车为例
- 在AGV送料车下方安装RFID读写器,在送料车上放置托盘、料架、料箱等货物进行运输,由RFID读写器识别轨道节点上的RFID地标来选择站点进行送料。
- 在物料循环运送路线上的轨道节点处安装写有站点编码的RFID地标,车间操作人员在点料端呼叫所需物料,中央调度系统调度对应AGV开始运送物料。
- AGV行驶途中,车身下方RFID读写器主动识别RFID地标中存储的位置信息后反馈给PLC控制器(控制系统模块),PLC接收编码数据并处理信息后,控制AGV送料车按送料路线选择正确站点停靠。
- 物料送达站点后AGV送料车可根据指令进行下一站点的物料运送,所有送料指令完成后,送料车按设定路线返回起点完成空车回收。
- 其他类型AGV应用中,也可通过自动识别行驶路线上的RFID地标,实现AGV在正确站点停靠。
系统架构
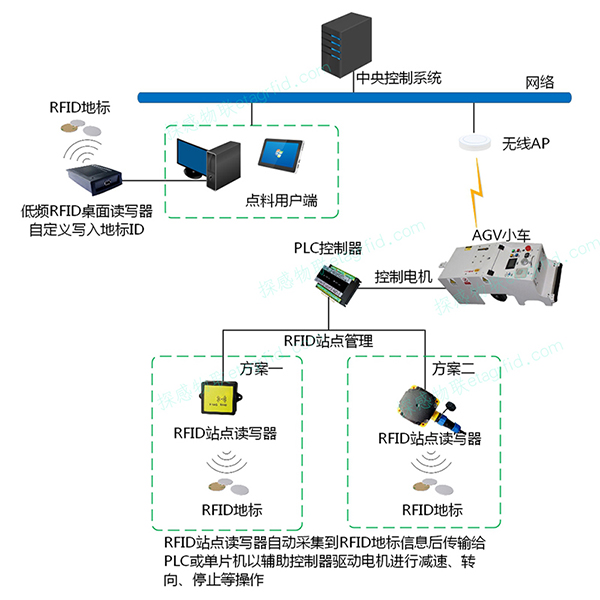
系统架构图
系统示意
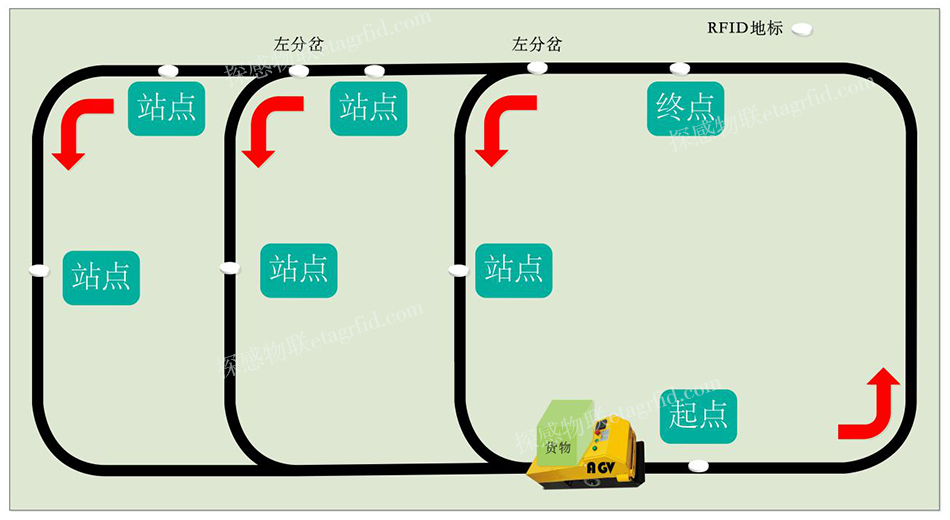
系统示意图
系统应用
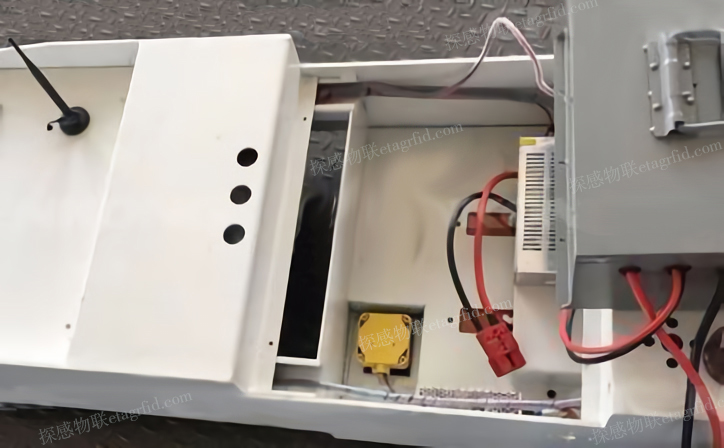
系统应用图一

系统应用图二