







巡检机器人路径识别系统
浏览次数:7258
分类:智能制造系统


巡检机器人路径识别系统是采用RFID技术,在巡检节点或行车轨道上安装RFID定位标签,在巡检机器人上安装RFID站点传感器,巡检机器人在行驶过程中通过传感器读取站点标签对巡检路径规划进行站点识别,从而控制巡检机器人完成巡检任务,该系统广泛用于电力、化工、钢铁、石油管线、轨交隧道、工业厂区等设备密集型行业的日常巡检需求和定期点检管理,如:管廊巡检、电力巡检、铁路巡检等.
系统优势
- 能满足巡检机器人全天候、全方位、自主智能巡检的站点追溯管理;
- 能满足不同行驶速度下巡检机器人站点识别,最快可支持速度2.5m/s;
- 能满足不同电压AGV车设计要求,最大支持电压30V,最小9V;
- 可选配Modbus-RTU协议RFID读写器,便于PLC等控制系统集成开发;
- RFID读写器可通过RS232、RS485串行接口与PLC、单片机等通讯;
- RFID读写器采用工业级设计,并能有效抵抗电磁干扰及金属干扰;
- RFID地标可自定义编码,支持户外埋地、金属导轨等不同场景安装。
系统原理
由于对于不同危险区域的巡检不尽相同,所以本方案的系统设计以电力变电站环境中的自动巡检机器人为例。
- 变电站巡检机器人是由直流电机驱动,具有智能巡航、视频采集、温度检测功能,支持自主和遥控两种方式来替代人工巡检。整体结构主要包括主控制器、线路检测模块、电机驱动模块、视频采集模块和环境监测模块等,RFID技术主要用于线路检测模块中,实现机器人的定位。
- 在电力设备巡检线路上的巡检点安装RFID地标,RFID地标中存储有定位信息,在转弯的地方安装RFID地标以提供转弯信息,在巡检机器人上安装RFID阅读器。
- 机器人经过时通过RFID阅读器读取RFID地标的位置信息,并将读取到的数据新上传至主控制器,主控制器根据提供的地标位置信息进行分析后,控制其他模块进行相应操作(包括采集视频图像、环境温度等)。
- 数据采集成功后,机器人完成对巡检点电力设备的巡检任务,主控制器控制机器人沿着巡检路线继续巡检,并通过RFID阅读器寻找下一个巡检任务点的RFID地标。
系统架构
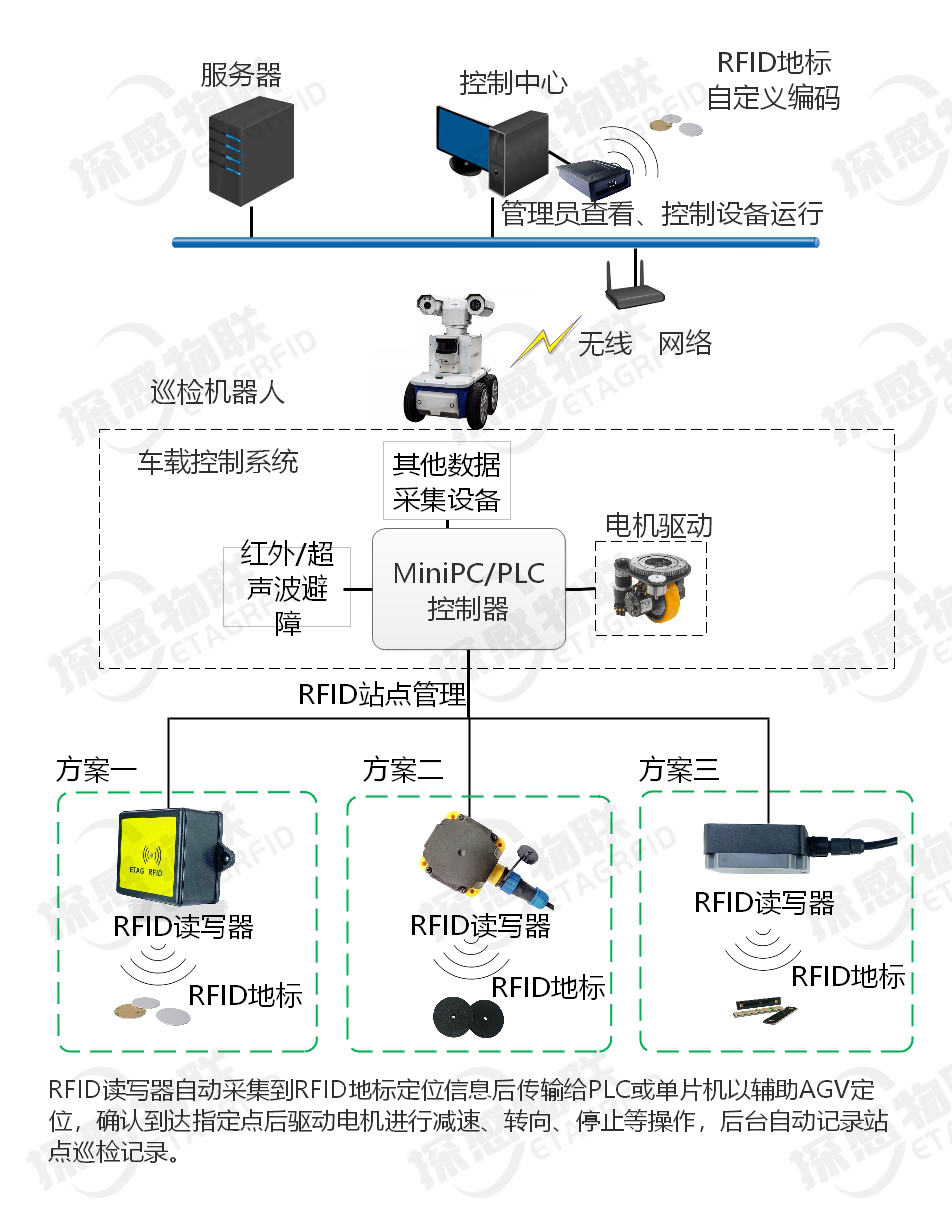
系统架构图
系统示意
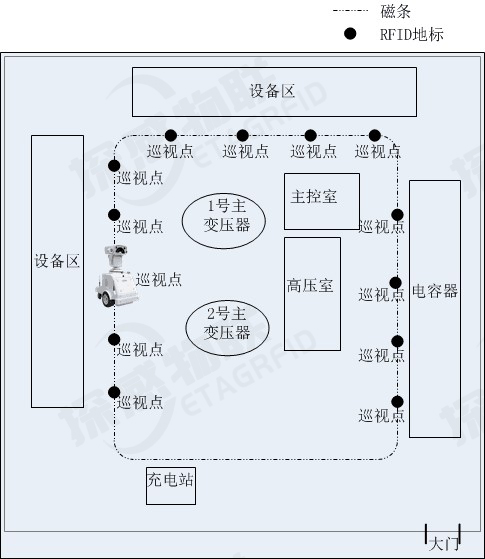
系统应用

系统应用图一

系统应用图二